- 打印
- 字號
- 收藏
IPE100系列工程型變頻器
深圳市英威騰電氣股份有限公司
(4)系統四象限運行分析
電機正轉,電機的輸出轉矩通過減速機轉換后作用在皮帶機的驅動輪轂上,并與上層皮帶自重沿傳輸面重力分量作用在皮帶機驅動輪轂上的 力矩組合,電機工作在第一象限。當皮帶上煤后,煤的重量沿皮帶傳輸方向的分力也作用在驅動輪轂上,并使驅動力矩逐漸增大,當驅動力矩超過摩擦力力矩后,驅動輪轂的轉速將加速轉動,通過機械連接使得電機轉子也加速轉動,其速度超過電機的同步轉速;此時電機處于反轉再生狀態,電機工作在第二象限。當電機反轉時,則工作在第二、四象限。
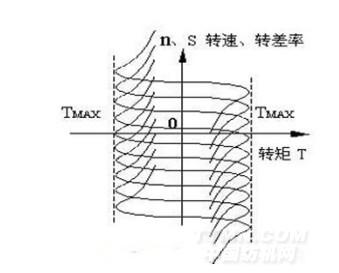
電機運行在第一、三象限時為電動態,其定子中的旋轉磁場、電機的輸出電磁轉矩與轉子的轉向同向,電機輸出的電磁轉矩是轉子的驅動力矩,此時電機從電網吸收的電能大部分有電磁轉矩作用到轉子上以機械能形式輸出。當電機運行在第二、四象限時為再生態,由于轉子切割磁力線的方向發生了改變,故電機作用到轉子上的帶電磁轉矩方向也發生改變,成為轉子的制動阻力力矩;此時電機轉子被負載的合成力矩拖著以超過同步轉速的速度轉動,負載作用在皮帶機的驅動輪轂上的機械能有電機反饋回電網。變頻器驅動三相異步電機工作在四個象限的示意圖如下:
五、調試注意事項
1、整流器電壓環PI參數調節
當變頻器在現場安裝后,由于現場電源側變壓器的電感等原因,變頻器的PWM整流可能會出現以下情況:
(1)整流器運行輸出過電壓(OV),當出現過電壓時適當降低電壓環比例系數和積分系數,增大比例系數KP可加快電壓的動態響應,但KP過大容易產生振蕩。增大積分系數KI可加快電壓的動態響應,但KI過大會導致電壓超調且容易產生振蕩。通常先調節比例系數KP,在保證系統不振蕩的前提下盡量增大KP值,然后調節積分系數KI,使系統既有快速的動態響應又超調不大。
(2)整流器運行輸出電壓波動大,此時適當降低電壓環動態比例系數和動態積分系數。
(3)整流器運行過電流(OC),此時可適當調低電流環比例系數和積分系數。通過對電流環的調節改變有功電流分量和無功電流分量的動態響應。增大比例系數KP可加快電流環的動態響應,但KP過大容易產生振蕩。增大積分系數KI可加快電流的動態相應,但KI過大電流超調且容易產生振蕩。通常先調節比例系數KP,在保證電流不振蕩的前提下盡量增大KP值,然后調節積分系數KI,使系統既有快速的動態響應又超調不大。
2、抱閘與松閘的控制,抱閘系統的開閘信號由集控系統給出,開閘后反饋信號給集控系統,變頻器起車;停車時集控系統給出停車信號變頻器減速,當變頻器到0Hz是繼電器輸出信號,抱閘系統抱閘。
3、整流與逆變的起、停車順序,啟動時集控系統先給整流器起車信號,整流起車后延時5s給出逆變起車信號,逆變起車;停車時,逆變減速到0Hz,運行繼電器輸出信號停止后整流停車。
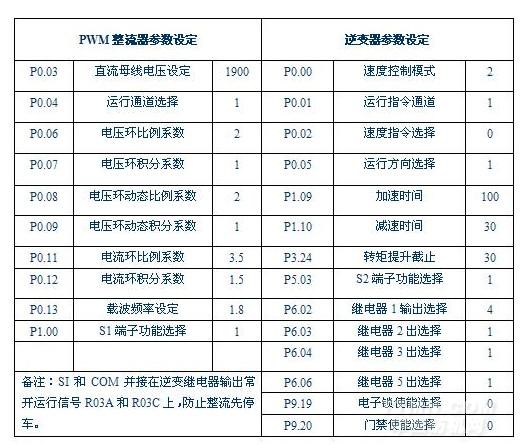
六、變頻器參數設定